Tel. 01538 756800
Servo Motors
This video kindly made available by Mr Glyn Jones shows a Swiss barrier crossing on his 'Maloja' layout. The barriers are operated by our Dual Servo Motor Controller.
The video of the engine shed doors opening by servos controlled by the Dual Servo Motor Controller was kindly supplied by by Mr J Pilborough. The linkage between the Servo motor arm and the gate is with a coil spring. This prevents damage if an engine is accidently drivem into a closed door.
Servo motors have many applications for model railways. Some things which may be operated by servo motors are: points (slow motion operation), semaphore signals, uncoupling ramps, opening and closing both swinging and sliding doors (e.g. engine shed, factory), gates (private siding or level crossing), wagon tipplers, and level crossing barriers. They can also to animate models of swings, cranes, beam engines, fairground rides, moving figures sawing, swinging hammers or picks, raising beer glasses, waving at trains etc. Another use is for raising and lowering permament magnets for uncoupling or for stopping and starting Faller road vehicles.
Servo Motors

Servo motors are different to ordinary electric motors. Servo motors have an arm which moves to a position (angle) determined by a control signal. For this reason they have 3 wires connecting to them two for power and one for the control signal.
Inexpensive good quality servos are made for radio controlled models. (e.g. for controlling the rudder of a radio controlled boat.) These are well suited for use with model railways. Typically a servo motor can move its arm over a total angle of approximately 170 degrees
Servo motors have a lot of torque for there small size. You will see Servo motors described as analogue or digital. (This is not the same as model railway controls which are coincidentally described with the same words). Both types of servo will work with our servo controllers but we have found digital servos to be superior for operating signals and other delicate mechanisms as they do not twitch when first powered up like analogue servos. We supply digital minature servos. These have dimensions of 23 x 11.5 x 24mm.
Servo Motor Controllers
Our Servo Controllers allow two positions (which we have called open and closed) to be set and remembered. The servo motor moves between these positions at an adjustable speed in response to a switch (contact, relay or one of our boards). The Controller has a memory to remember these positions and speed settings even after power has been switched off. Setting up the positions and speeds is straightforward and just requires the use of the three push buttons fitted to the Controller. There are also a minimal number of electrical connections, two wires to connect to power and two to a (control panel mounted) on/off switch is all that is necessary for a lot of applications.
We make both Single and Dual Servo Motor Controllers and also the bouncing semaphore controller which is described on a separate page. These controllers provide the correct power and position signal to one or two servo motors. These give an easy way to fix the “open” and “closed” positions of the servo motor's arm movement and set the speed at which the servo arm moves. They can be connected to an on/off switch or one of our boards for example an IRDOT-1D. When a 0 volts connection is made to terminal S (ie a switch connects the 0V power terminal to the S terminal the servo motor will move to its closed position, when no connection is made (switch is thrown open) the servo will move to its open position.
Terminal F is used if you wish to sequence the operation of the servo motors. Its use is optional. When the servo motor is at its open position terminal F will switch to 0 volts. Hence terminal F can be wired into terminal S of the next servo motor causing it to operate when the first servo motor has finished moving. Terminal F can also be wired into terminal S of its own controller causing the servo motor to repeatedly open and close. This is usefull for animating swings beam engines etc.
Wiring Connections
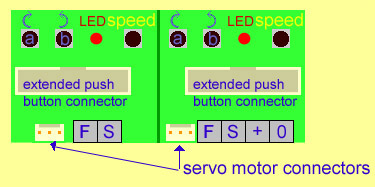
The servo motor plugs into the 3 way connector on the board labeled servo motor connector”. A power supply of preferably 12 volts DC (however 9 to 16 volts either AC or DC will work) is connected to terminals “+” and “0” on the Controller board and the required connections are made to the F and S terminals.
More than two servo motors can be worked in sequence by making extra F to S connections between Servo Motor Controller Boards. These can loop back to the start so that you can have any number of servo motors continually operating one at a time. If you wish a pause between servo motors operating this can be arranged by using one of the timers on the Dual Timer Board. The Random operation of the Dual Timer Board can also be used to automatically trigger servo motors into operation at random times. This can be effective for certain scenic effects.
Wiring Diagrams for Different Operations
 |
|---|
| Fig 1.Each servo motor is controlled by its own on/off switch. Use for point or signal control. |
 |
|---|
| Fig 2 One switch operates two servo motors together. Use for operating the two barriers of a level crossing or moving two points together where the two points form a crossover, or opening two engine shed doors, etc. |
 |
|---|
| Fig 3 One switch operates both servo motors sequentially. First, servo motor 1 moves from the open to a closed position, then servo motor 2 moves from the open to a closed position. Use for crossing gates to give gate clearance whilst movement is taking place. When the switch is returned to its original position servo motor one will return followed by servo motor 2. |
 |
|---|
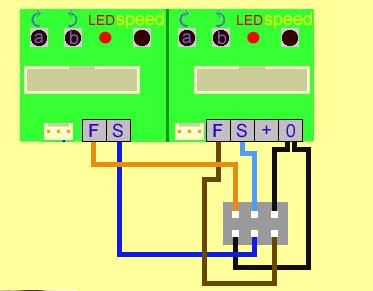
| Fig 4 One switch operates both servo motors sequentially. First, servo motor 1 moves from the open to a closed position, then servo motor 2 moves from the open to a closed position. However when the switch is returned Servo motor 2 returns then servo motor 1. This requires a dpdt switch represented by the grey block. |
 |
|---|
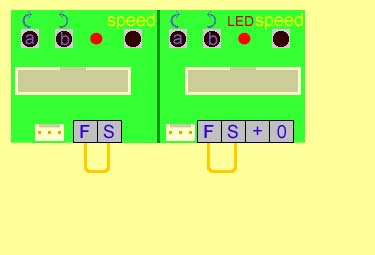
| Fig 5. The servo motors continually open and close. Use to animate a beam engine, figure sawing etc |
This video shows how connecting the F and S wires (with the brown wire) make the servo motor oscillate backwards and forwards. Both the speed and range of movement are easily adjusted. The Single Servo Controller has been used. The two black wires are the connection to 12 Volts DC to power the Controller. (This was filmed a while ago with the old version of the Single Servo Controller, the new version functions identically but is smaller in size)
Extended Push Button Box
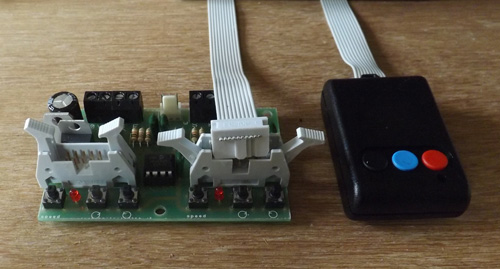
This is for use where the servo motor controller is in a location which is difficult to access to adjust the settings. The Extended Push Button Box has the three push buttons black ,blue and red and an LED. These work identically to the push buttons on the controller board. The Extended Push Button Box connects to the Servo Motor Controller with a two metre length of cable which plugs into a connector on the controller board. Note the notch on the connector to prevent connecting the wrong way round. The cable is easily removed using the release levers on the connector. As the Extended Push Button Box is only used for initially setting up the open and closed positions and the speed only one Extended Push Button Box is required regardless of the number of servo motor control boards. The Extended Push Button Box is not compatible with the Bouncing Semaphore controller.
Mechanical
The servo motors are supplied with a packet of various arms with holes to attach steel wire. We can supply a bracket for mounting these (miniature size servo motors). The bracket can be used to mount the servo motor either with its arm movement at right angles to the baseboard or parallel to the baseboard. Right angled fixing allows operation of barriers signals and points. Parallel fixing is suitable for gates and doors.
Level Crossings gates and barriers
Servo motors are very suited to operating both of these. Operation can either be manual by an on off switch or automaticillay triggered by the approach of trains by using the contacts on one of our crossing controller boards to activate the S terminal(s) of Servo Motor Controllers. Using one of these boards with a barrier crossing provides the electronics to operate the flashing road signal lights. There are a number of customers videos of gated crossings in both N and OO gauge on You Tube.
Crane operation
The crane uses one Dual Servo Motor Controller and two servo motors; one for crane rotation and one to raise and lower the jib.
Rotation
A plastic tube was fixed to the underside of the crane's cab and extended through holes drilled in the crane chassis and the baseboard. The bottom of the tube is connected to the servo motor.
Crane jib
Raising and lowering the jib uses a piece of a cotton thread tied near to the end of the jib. The thread passes over a piece of rod above the cab and down through the tube then along to the second servo motor where it is attached to the servo's arm.
Electrical Connections
The crane is operated by an on/off switch wired to start the first (rotation) servo.
F of this control is wired to S of the second control to start the jib movement servo. Throwing the switch causes the jib to rotate clockwise then the jib to rise.
Releasing the switch causes the jib to rotate anticlockwise and the jib then to lower. If the switch is wired to S of both controls rotation and rising would occur simultaneously. An IRDOT-1 could replace the switch and would enable the crane movement to be initiated by trains arriving or departing from a siding alongside the crane.
Rotation
There is a slot sawn with a hacksaw at each end of the plastic tube. One slot allows the tube to open slightly to give a tight push fit onto the underside of the crane. The second slot forms part of a universal joint eliminating alignment problems between the crane's and servo motor's rotation. To form the second half of the universal joint the servo motor is fitted with the circular plate attachment. A U shaped piece of stiff wire is attached to this via the holes in the plate. The servo motor is then fixed at a height where the U shaped metal will fit in the slot.
It may be better to use Nylon fishing line rather than cotton as it is smoother and less likely to snag. A slight load on the jib head will keep the thread under tension so making the movement smoother.
Signal operation
A Signal is easily operated by a servo motor and Servo Motor Controller
With both signal and servo motor in midpoint position a wire is attached from the signal balance weight to the servo motor arm.
Connection of the servo motor is made to the Servo Motor Controller. The adjustment for the two signal positions can now be made. The arm movement change operates the signal. The speed of movement may be adjusted. To automate the signal replace the switch by an IRDASC, IRDOT-3D or SA board.
Point operation
Servos have a number of advantages for operating points. They give adjustable slow motion operation. The Servo is continually powered resulting in the point blade making firm contact with the stock rail and they are a small size. Another advantage is that the Servo Controller is operated by standard (as opposed to momentary) toggle switches. You can for example use a DPDT (double pole double throw) switch and use one pole for the Servo Controller and the second pole for switching the polarity of the points frog. Extra poles of the switch can also be used to operate 2 aspect signals or be used to interlock our signal control units to the points position or operate the feather terminal on the MAS Sequencer RI or IRDASC4 RI. We stock 4 pole toggle switches which gives plenty of contacts for these purposes.
View of servo and Servo Controller activating the Points from beneath the Baseboard
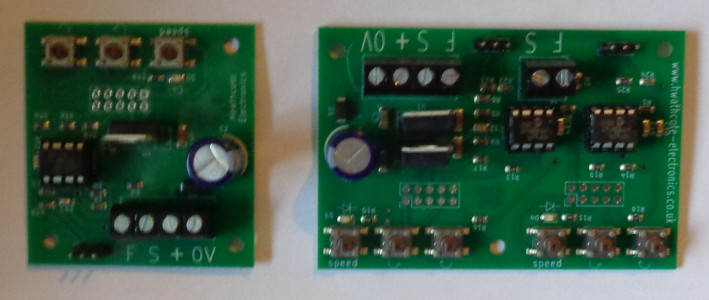
The photographs show the latest design of Single and Dual Servo Motor Controllers. The videos were made with earlier versions of the controllers. Connections and operation of the latest version is identical to the previous versions.
Below are the Single and Dual Servo motor controllers with extended push button connectors.
